


All Issues
Autoguidance system operated at high speed causes almost no tomato damage
Publication Information
California Agriculture 58(1):44-47. https://doi.org/10.3733/ca.v058n01p44
Published January 01, 2004
PDF | Citation | Permissions
Abstract
This project explored the effectiveness of an autoguidance system based on a real-time kinematic global positioning system (RTK GPS) accurate to the centimeter (about half-inch) in agricultural production. Our objectives were to determine the effect of spacing between cultivator disks or knives and forward tractor speed on plant damage, and of deep tillage operations on drip-tape damage. Two sets of split-plot field experiments were conducted (with processing tomato transplants and direct-seeded tomatoes) in a Yolo loam field on the UC Davis campus. No significant plant damage occurred even at 7 miles per hour (mph) forward speed and cultivator disk spacing of 2 inches from the plant line. In an additional split-plot test, there was no significant damage to drip tape when the fertilizer shank was operated 2 inches from the drip tape at 3.5 mph. This system allows for automatic steering of the tractor and implements along a path close to buried drip-tape and/or plants without damaging them, even at high operational ground speeds.
Full text
The availability of global positioning systems (GPS) for civilian use has opened the possibility of locating virtually any object on the surface of the Earth to any desired degree of accuracy. Inexpensive hand-held GPS devices, costing only a few hundred dollars, can provide accuracy in the range of 10 to 66 feet and are well suited for recreational purposes such as boating. Some of these hand-held devices include WAAS (Wide Area Augmentation System), a satellite-based free-differential correction of atmospheric and other GPS signal distortions, capable of delivering accuracy to within about 10 feet.
These systems are increasingly accepted in agriculture for scouting purposes such as locating patches of weeds or grid points. Differential GPS (DGPS) units, which use free Coast Guard beacons where available or for-fee satellite correction from vendors, can provide accuracy to less than 3.3 feet.
These systems cost about $3,000 to $5,000 and are widely used in precision farming for mapping yield, soil electrical conductivity and variable rate application of agricultural chemicals. At the high end of the spectrum are ultraprecise GPS units, known as real-time kinematics GPS or RTK GPS, which can provide accuracy to within about 0.4 inches on-the-go. These systems consist of a rover (a mobile unit) and a local base station; they cost $40,000 to $50,000.
In spite of the high cost, tractors equipped with RTK GPS are rapidly increasing in production agriculture, particularly in California, because they can successfully navigate a tractor along parallel paths with about 1 inch (2.5 centimeter [cm]) accuracy day or night. Although steering is automatic, tractors must be manned for safety and legal reasons; the automatic steering system produces an audible signal periodically to make sure that the operator has not gotten off the tractor, and the operator must turn the tractor at the headlands. Tractors equipped with these RTK GPS-based autoguidance systems enhance productivity by eliminating guess rows (beds at slightly different distances apart due to overlap while operating tractors), virtually eliminating overlap and allowing farming to continue nearly 24 hours a day.
In addition, cultivator disks and knives can be adjusted close to plant lines (about 2 inches) and the tractor can be operated at relatively high speed (up to 7 miles per hour [mph] or more) with minimal operator input. Likewise, chemicals can be applied onto a narrow strip (3 to 4 inches) along the crop line, reducing environmental contamination and lowering costs.
Moreover, in irrigated agriculture, tractors equipped with the RTK GPS-based autoguidance system can promote the adoption of highly efficient (both in water and energy use) microirrigation systems. Drip tape can be left buried about 10 to 12 years (as opposed to replacing annually in many crop systems), and all operations can be conducted around drip tape because its location is known to within 1 inch. A typical farmer may justify switching to microirrigation if drip tapes can be used for multiple years (personal communication, Tony Turkovich, Button and Turkovich, Winters, CA). With production costs rising and competition increasing from overseas (CTRI 2001), farmers are looking for new technologies to enhance their competitiveness.

Ultraprecise global positioning systems (GPS) are now available that can guide tractors at high speeds in agricultural fields, running to within inches of plants with very little damage. Above, at UC Davis, tomato seedlings are transplanted using an autoguidance system. The GPS unit is on top of the tractor cab. Below, drip tape is installed at the same time.

Autoguidance for ag vehicles
Although interest in autoguidance dates back to the 1920s, successful systems evolved only recently (Wilson 2000; Reid et al. 2000). Early systems used mechanical sensors that sensed a crop row or furrow, followed by laser-based optical sensors (Tillett 1991). While these systems proved the feasibility of the autoguidance concept for agricultural tractors, they were not practical. The widespread availability of inexpensive and powerful microcomputers and advances in image processing led to the development of autoguidance systems based on machine vision in the 1980s and 1990s (Billingsley and Schoenfisch 1997; Debain et al. 2000; Keicher and Seufert 2000; Marchant et al. 1997; Reid et al. 2000; Tillett 1991; Torii 2000; Wilson 2000).
These vision-based systems require a guidancy directrix (guiding line) such as a crop row. Introduction of RTK GPS to agriculture in the past decade led to the development of a self-contained (not dependent on a crop line or furrow wall) autoguidance system. The first successful RTK GPS-based autoguidance system was demonstrated in spring 1996 (Wilson 2000). RTK GPS has increased in popularity because of its ability to guide a tractor along the same path again and again not only within a season, but also year after year at high speeds and with minimal damage to plants, implements or drip-irrigation systems. As a result, at least three manufacturers are currently marketing autoguidance systems based on RTK GPS.
This technology may also lead to further reductions in costs for row crop production. For example, Ehsani et al. (2000) showed that planting and transplanting equipment can be instrumented to sense seeds or seedlings as they are planted and locate them precisely (to 2 inches accuracy). Such a precise plant map can subsequently target weeds using a simple greenness sensor (any green object that is not a part of the original plant map is considered a weed and can be sprayed).
Study of damage to plants, drip tape
To provide information for growers considering the adoption of an RKS GPS-based autoguidance system, we studied the effects of spacing between cultivator disks or knives and the plant line and tractor travel speed on plant damage, and the impact of deep tillage operations on damage to buried drip-tape. All field experiments were conducted at the Western Center for Agricultural Equipment on the UC Davis campus. A 1,000-feet-by-250-feet section was marked off and divided into four blocks, with each block further divided into two main plots. These main plots were subjected to cultivator knife spacing of 2 or 3 inches from the plant line (main factor levels). Within each main plot, two subplots were subjected to travel speeds of either 3.5 mph or 7 mph (subfactor levels). The ground was disked, subsoil ripped, disked again and triplaned in preparation for planting.
Prior to the experiment an AB line was established using the autoguidance tractor, which served as a reference line for all subsequent field operations. An AB line is an imaginary line established by locating two points (A and B) with the autoguidance system. All crop rows are planted parallel to this line. Prior to any field operation, the tractor is driven to point A (usually located at one end of the field) and the location is marked on the RTK GPS unit; then the tractor is driven to point B (usually at the other end of the field) and marked.
Before any study operations were conducted, the implement was centered with respect to the AB line of the autoguidance system. To accomplish this task, a plumb line was dropped from the tractor PTO (power-take-off shaft) and the equipment was centered directly behind the tractor PTO. To ensure that the implement followed the auto-steered tractor without influencing the tractor's steerability, sway blocks were used to obtain a clearance of about one-sixteenth inch at the hitch points. If the three-point hitch is blocked, the implement tends to steer the tractor, resulting in the loss of autoguidance accuracy.

Processing tomato seeds are planted using an autoguidance system. In two trials, total plant damage was 2% and zero when the autoguided cultivator was operated at 7 miles per hour and 2 inches from the plant line.

The autoguidance tractor equipped with a cultivator leaves behind a narrow strip of untilled land along the plant line.
The first operation involving autoguidance was listing to create beds in the field. A one-and-a-half-row lister (three shovels) was used to bed up the field on 60-inch beds. Subsequently, sprinklers were used to preirrigate the field. After 4 days, a single-row, early spring, S-tine cultivating sled was used to remove any weeds. After cultivation, napropamide (a pre-emergence herbicide) was applied and a power incorporator was used to shape the beds. Once the beds were shaped, the field was transplanted, rimsulfuron (an herbicide) was applied, and the field was irrigated to establish a good stand.
Tomato transplants
After the field was properly prepared, tomato seedlings were planted using a three-row transplanter. Drip tape with emitters located every foot was installed 5 inches away from the plant line and 5 inches below the top of the bed during the transplanting operation. A wire mesh fence was installed around the field perimeter to keep out rabbits.
Due to equipment problems, the first cultivation was delayed 33 days. The tomato plants were then approximately 1 foot tall and about 6 inches wide. A three-row cultivator was properly adjusted to obtain either 2-inch or 3-inch spacing between cultivator discs and the plant line, and tests were conducted at forward speeds of 3.5 mph or 7 mph. Following cultivation, a 30-foot section of the bed was randomly selected along each row, and plant damage was assessed by carefully looking at each plant to identify parts broken by action of the cultivator discs. Plant height was recorded for each section. A second cultivation was performed in about a week using the same procedure, and the plants were once again evaluated for damage.
Seeded tomatoes
After the transplanted processing tomatoes were evaluated for damage, the plants were chopped with a flail mower and the beds were reshaped with a power incorporator. A vacuum planter was used to plant seeds. Unfortunately, due to high temperatures many seeds did not germinate, resulting in open space for larger and more numerous weeds.
However, we found sections of the field with a sufficient plant stand to continue the experiments. The field was cultivated 40 days after planting. Since the plants were quite small, about 6 inches high and 2.75 inches wide, a set of discs was used ahead of the cultivator knives. These discs left behind a narrow strip of untilled land along the plant line.
Once again, a strip of the bed was randomly selected along each row to evaluate plant damage due to cultivation. Since the plant stand was poor, the strip length had to be increased such that there were at least 30 plants in the strip. Following the first cultivation test, a second cultivation was conducted after 3 days and plant damage was evaluated.
Drip-tape damage
To investigate the effect of deep tillage on drip-tape damage, a fertilizer shank was pulled through the field the following spring. A split-plot design was implemented with the distance to the drip tape from the shank as the main factor and depth of the shank as the subfactor. The main factor was set at either 2 inches or 3 inches and the subfactor was either 6 inches or 8 inches. All tests were conducted at a forward speed of 3.5 mph. Following the tillage operation, the field was microirrigated to determine if the drip tape was damaged.
Damage low at high speeds
The experimental data was statistically analyzed to determine the effectiveness of the autoguidance system in enhancing the timeliness of the operation while minimizing plant and drip-tape damage.

Left, a fertilizer shank is used in deep tillage operations to determine the ability of the autoguidance tractor and implement to stay clear of buried drip-tape. Above, on the light bar in the tractor cab, a green LED in the center indicates that the GPS unit is on track.
Transplanted tomato damage
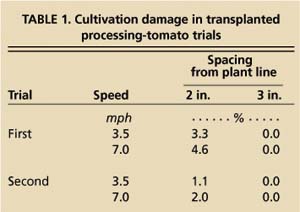
The data on plant damage during the cultivation was expressed as fractions. These damaged fractions were obtained by dividing the number of damaged plants in a section by the number of plants in that section. Since we used a three-row planter, there were three subsamples per observation. These subsamples were averaged before conducting the statistical analysis. The results indicated no significant differences between the low (3.5 mph) and high (7 mph) speeds (table 1). Moreover, the interaction between cultivator knife spacing and operation speed was not significant. The first cultivation with 7 mph speed and cultivator knife spacing 2 inches from the plant line resulted in about 4.6% plant damage, while plant damage was much less at all other treatments.
The main reason for increased error in the high-speed, low-spacing treatment was an error in the initial adjustment of the cultivator, which was subsequently corrected. In fact, most of the plant damage occurred in the first rows. Once the final adjustments were made, much less plant damage, if any, was observed. Moreover, the tomato plants were 6 inches high and 3 inches wide on average at the time of planting. However, by the cultivation date 33 days later, the plants had on average doubled in height and width. This larger plant volume affected plant damage negatively. (The delay in first cultivation was caused by equipment failure, as mentioned above.)
Seeded tomato damage
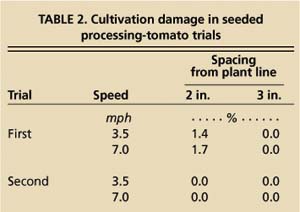
During the first cultivation trial, total plant damage was less than 2% for the high-speed, low-spacing treatment (7 mph and 2-inch spacing from the plant line), which was more likely to cause plant damage (table 2). There was no damage at all due to any of the treatments in the second cultivation trial. These results indicate that the auto-guidance system can steer a tractor very close to a plant line (within 2 inches) at relatively high speed (7 mph) without damaging plants.
Buried drip-tape
The results of the tillage study using the fertilizer shank indicate that the autoguidance system can successfully navigate a tractor close to buried drip-tape without causing damage. The experiment resulted in drip-tape damage at only one spot at the beginning of one of the 48 rows. This damage occurred because the soil was quite hard and dry, and the shank followed a prevailing crack rather than cutting the hard soil; in turn, the shank bent and cut the tape. This damage could have been avoided if the shank was more rigid or the tillage operation was conducted at a more favorable soil-moisture content. In any case, overall damage to the drip tape was negligible.
Based on the results of this study we conclude that the autoguidance tractor can successfully cultivate transplanted and seeded processing-tomato fields with minimal damage, even at a forward speed of 7 mph and a cultivator knife spacing of 2 inches from the plant line. The deep tillage operation using a fertilizer shank showed that there was no damage to drip tape when the auto-guidance tractor was operated at a forward speed of 3.5 mph, 2 inches from the buried drip-tape.
Autoguidance system operated at high speed causes almost no tomato damage

